스테퍼 모터 또는 서보 모터: 어느 것을 사용해야 합니까?
2026-02-04
1149
카탈로그
그림 1. 서보 모터와 스테퍼 모터
스테퍼 모터란 무엇입니까?
에이 스테퍼 모터 은 일종의 전기 모터 일반 모터처럼 부드럽게 회전하는 것이 아니라 작고 고정된 단계로 움직이는 것입니다.각 단계는 샤프트를 정확한 각도로 움직이므로 스테퍼 모터는 정확한 위치 지정 및 속도 제어에 매우 좋습니다.모터에 전기신호를 보내면 단계별로 회전하게 됩니다.이러한 단계를 계산함으로써 컨트롤러는 센서를 사용하지 않고도 모터가 얼마나 멀리 이동했는지 정확하게 알 수 있습니다.이것이 바로 정밀한 움직임이 필요한 기계에 스테퍼 모터가 사용되는 이유입니다.
스테퍼 모터는 다음과 같은 마이크로 컨트롤러를 사용하여 쉽게 제어할 수 있습니다. 아두이노 또는 라즈베리 파이.그들은에 적용됩니다 3D 프린터, CNC 기계, 카메라 슬라이더, 그리고 더.스테퍼 모터는 정확하고 저렴하지만 과부하가 걸리면 스텝을 잃을 수 있으며 일반적으로 서보 모터보다 속도가 느립니다.
스테퍼 모터 작동 방식
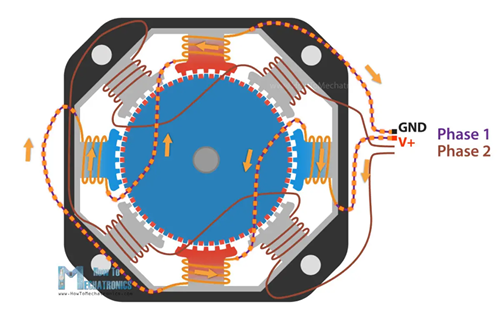
그림 2. 스테퍼 모터 작동 다이어그램
스테퍼 모터 에 의해 작동 회전 지속적으로 회전하는 대신 작고 고정된 단계로 진행됩니다.이 단계별 동작을 통해 위치와 속도를 매우 정밀하게 제어할 수 있습니다.모터 내부에는 코일 (전자석) 주위에 배열 중앙 샤프트 (로터).하나의 코일을 통해 전기가 흐르면 회전자를 코일 쪽으로 끌어당기는 자기장이 생성됩니다.특정 순서로 코일을 켜고 끄면 로터가 한 번에 한 단계씩 한 위치에서 다음 위치로 이동합니다.각 단계는 알려진 각도(예: 단계당 1.8°)만큼 샤프트를 이동합니다.컨트롤러는 전송된 단계 수를 계산하여 센서 없이도 모터가 얼마나 멀리 회전했는지 정확히 알 수 있습니다.단계를 더 빠르게 보내면 모터가 더 빠르게 회전합니다.더 적은 수의 단계를 보내면 천천히 또는 정확한 위치로 이동합니다.
서보 모터란 무엇입니까?
서보 모터 다음을 위해 설계된 모터 유형입니다. 정확한 위치, 속도, 그리고 움직임 제어.전원이 공급되면 회전하는 단순한 모터와 달리 서보 모터는 피드백을 사용하여 얼마나 멀리, 얼마나 빠르게 움직이는지 정확히 파악합니다.서보 모터 시스템 내부에는 모터, 제어 회로, 피드백 장치(보통 엔코더)가 있습니다.서보 모터에 특정 위치로 이동하라고 지시하면 엔코더는 실제 위치를 확인하고 해당 정보를 컨트롤러로 다시 보냅니다.모터가 올바른 위치에 있지 않으면 목표에 도달할 때까지 자동으로 조정됩니다.
서보 모터는 정확성을 유지하면서 빠른 속도와 변화하는 부하를 처리할 수 있기 때문에 로봇, CNC 기계, 산업 자동화, 카메라 시스템 및 로봇 팔에서 널리 사용됩니다.
서보 모터의 작동 원리
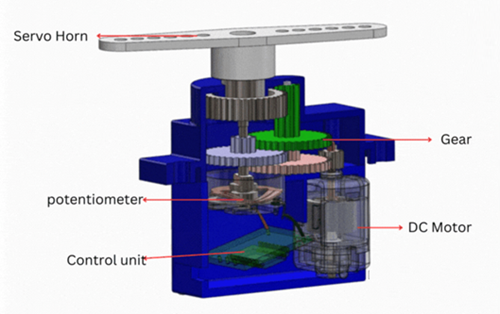
그림 3. 서보 모터 작동 다이어그램
에이 서보 모터 에 의해 작동 피드백 사용 위치, 속도, 움직임을 매우 정확하게 제어합니다.전원이 공급되면 회전하는 단순한 모터와 달리 서보 모터는 항상 자신의 위치와 가야 할 곳을 알고 있습니다.서보 시스템 내부에는 세 가지 주요 부분이 있습니다. 모터, 컨트롤러, 그리고 피드백 센서 (보통 인코더).원하는 위치 등의 명령을 보내면 컨트롤러는 모터에 움직이라고 지시합니다.동시에 엔코더는 모터의 실제 위치를 측정하고 해당 정보를 컨트롤러로 다시 보냅니다.모터가 올바른 위치에 도달하지 못한 경우 컨트롤러는 모터가 명령과 일치할 때까지 자동으로 전원을 조정합니다.이러한 지속적인 점검 및 수정을 폐쇄 루프 제어라고 하며 이것이 서보 모터를 정확하고 안정적으로 만드는 것입니다.
스테퍼 및 서보 모터의 유형
스테퍼 모터의 유형
영구자석(PM) 스테퍼 모터 - 영구자석 회전자를 사용하는 형식입니다.영구 자석 모터는 저속에서 적당한 정확도와 우수한 토크를 제공합니다.PM 스테퍼 모터는 간단하고 저렴하므로 기본 위치 지정 애플리케이션에 적합합니다.
가변 릴럭턴스(VR) 스테퍼 모터 - VR 스테퍼 모터에는 영구 자석이 없는 연철 로터가 있습니다.회전자는 전류가 흐르는 고정자 코일과 정렬되어 움직입니다.이 모터는 빠르지만 토크가 낮고 주로 경량 응용 분야에 사용됩니다.
하이브리드 스테퍼 모터 - 하이브리드 스테퍼 모터는 PM 모터와 VR 모터의 기능을 결합합니다.높은 정밀도, 더 나은 토크, 더 부드러운 모션을 제공합니다.이는 3D 프린터, CNC 기계 및 로봇 공학에서 가장 많이 사용되는 스테퍼 모터입니다.
서보 모터의 종류
DC 서보 모터 - DC 서보 모터는 정밀한 제어를 위해 피드백 센서가 있는 DC 모터를 사용합니다.제어가 쉽고 소형 로봇, 자동화 시스템, 교육 프로젝트에 적용됩니다.
AC 서보 모터 - AC 서보 모터는 고속 및 고전력 애플리케이션용으로 설계되었습니다.더욱 효율적이고 내구성이 뛰어나 산업 자동화, CNC 기계, 제조 장비에 이상적입니다.
위치 서보 모터 - 가장 일반적인 취미용 서보입니다.위치 서보 모터는 특정 각도(보통 0°~180°)로 회전하고 해당 위치를 유지합니다.로봇 팔, RC 차량 및 제어 시스템에 널리 적용됩니다.
연속 회전 서보 모터 - 위치 서보와 달리 일반 모터처럼 연속적으로 회전하는 형태입니다.위치 대신 속도와 방향이 제어됩니다.일반적으로 모바일 로봇과 구동 휠에 사용됩니다.
스테퍼 모터와 서보 모터의 차이점
스테퍼 모터와 서보 모터는 모두 모션 제어에 사용되지만 작동 방식은 매우 다릅니다.아래 표는 이들 간의 차이점을 보여줍니다.
개방 루프 및 폐쇄 루프 제어

그림 4. 개루프 제어
스테퍼 모터는 일반적으로 개방 루프 제어 시스템을 사용합니다.컨트롤러는 모터에 스텝 신호를 보내고, 모터는 이 명령에 따라 움직입니다.모터의 실제 위치를 확인하는 센서가 없습니다.이로 인해 스테퍼 모터는 특히 부하가 동일하게 유지되는 시스템에서 간단하고 저렴하며 제어하기 쉽습니다.
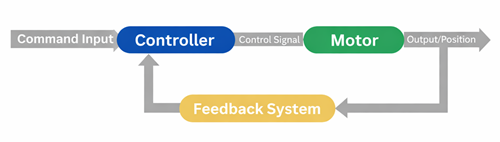
그림 5. 폐루프 제어
서보 모터는 폐쇄 루프 제어 시스템을 사용합니다.여기에는 컨트롤러에 움직임을 지속적으로 보고하는 인코더 또는 전위차계와 같은 위치 센서가 포함됩니다.컨트롤러는 이 정보를 목표 위치와 비교하고 모터를 자동으로 조정하여 모션의 정확성을 유지합니다.
스테퍼 및 서보 모터 토크 특성
스테퍼 모터는 회전하지 않을 때 가장 강한 토크를 제공합니다.이를 통해 전원이 공급되는 동안 위치를 단단히 유지할 수 있으며, 이는 저속에서 안정적인 위치 지정이 필요한 응용 분야에 적합합니다.모터 속도가 증가하면 사용 가능한 토크가 감소하여 빠르게 움직이는 시스템의 성능이 제한됩니다.
서보 모터는 동적 모션을 위해 제작되었습니다.다양한 속도 범위에서 일관된 토크를 제공하고 빠른 동작 변화를 처리할 수 있습니다.이로 인해 서보 모터는 빠른 시작, 정지 및 방향 변경이 필요한 응용 분야에 적합합니다.
스테퍼 및 서보 정확도
스테퍼 모터는 고정된 스텝 각도로 이동하여 정확도를 달성합니다.각 명령은 알려진 양만큼 모터를 이동시켜 설계 한계 내에서 작동할 때 올바른 위치를 지정할 수 있습니다.정확도는 적절한 부하 조건과 제어된 속도에 따라 달라집니다.
서보 모터는 위치를 지속적으로 확인하고 조정하여 정확도를 달성합니다.모터가 목표에서 벗어나면 시스템은 즉시 움직임을 수정합니다.이를 통해 서보 모터는 고속 모션이나 부하 조건 변화 중에도 정확성을 유지할 수 있습니다.
스테퍼 및 서보 성능
스테퍼 모터와 서보 모터는 전반적인 성능, 특히 속도, 에너지 사용 및 작동 부드러움에서 차이가 있습니다.이러한 요소는 특정 작업을 위한 모터를 선택할 때 중요한 역할을 합니다.
속도 및 가속도 비교
스테퍼 모터는 저속에서 중간 속도까지 가장 잘 작동합니다.단계별 동작은 속도를 부드럽게 가속하거나 변경할 수 있는 속도를 제한합니다.
서보 모터는 고속 작동을 위해 설계되었습니다.안정적인 동작을 유지하면서 빠르게 가속 및 감속할 수 있어 빠르고 반응성이 뛰어난 시스템에 적합합니다.
전력 효율 비교
스테퍼 모터는 위치를 유지하는 동안에도 지속적으로 전력을 소비합니다.이로 인해 특히 장기간 작동하는 동안 에너지 사용과 열 발생이 높아집니다.
서보 모터는 수요에 따라 전력 사용량을 조정합니다.움직임이나 부하가 증가할 때만 더 많은 전력을 소비하므로 전반적인 효율성이 향상됩니다.
소음 및 진동 비교
스테퍼 모터는 특히 특정 작동 속도에서 눈에 띄는 소음과 진동을 일으킬 수 있습니다.이는 민감한 응용 프로그램의 동작 부드러움에 영향을 미칠 수 있습니다.
서보 모터는 부드럽고 조용하게 작동합니다.진동을 최소화하도록 설계되어 안정적이고 조용한 움직임이 필요한 시스템에 이상적입니다.
스테퍼 및 서보 모터의 응용
스테퍼 모터의 응용
스테퍼 모터는 특히 부하가 예측 가능한 경우 느리고 정확하며 반복 가능한 움직임에 가장 적합합니다.
• 3D 프린터 – 정확한 레이어별 이동
• CNC 기계(소형/데스크탑) – 정확한 위치 지정
• 프린터 및 스캐너 – 용지 이동 제어
• 카메라 슬라이더 – 부드러운 단계 기반 모션
• 플로터 및 라벨 기계
• DIY 전자제품 및 로봇공학 프로젝트
서보 모터의 응용
서보 모터는 특히 부하가 변할 때 빠르고 부드럽고 강력한 모션에 이상적입니다.
• 산업용 로봇 및 로봇 팔
• CNC 기계(산업용 등급)
• 공장 자동화 시스템
• 컨베이어 및 포장 기계
• 의료 및 실험실 장비
• 항공우주 및 자동차 시스템
스테퍼 모터와 서보 모터 중에서 선택하는 방법
스테퍼 모터와 서보 모터 중에서 선택하는 것은 귀하의 애플리케이션 요구 사항에 따라 다릅니다.아래 사항은 빠르고 쉽게 결정하는 데 도움이 될 것입니다.
다음과 같은 경우 스테퍼 모터를 선택하십시오.
- 저속에서 정확한 위치 확인이 필요한 경우
- 부하는 가볍고 예측 가능합니다.
- 간단하고 저렴한 시스템을 원합니다.
- 모터는 전원이 공급되는 동안 위치를 유지해야 합니다.
- 속도와 가속도가 필요하지 않습니다
다음과 같은 경우 서보 모터를 선택하십시오.
- 빠른 속도와 빠른 가속이 필요합니다.
- 부하가 자주 바뀌거나 무거움
- 매우 높은 정확성과 신뢰성이 필요합니다.
- 부드럽고 조용한 움직임이 중요
- 산업 또는 전문 시스템에서 일하고 있는 경우
결론
스테퍼 모터와 서보 모터는 다양한 작업에 유용합니다.스테퍼 모터는 간단하고 가격이 저렴하며 느리고 정확한 움직임에 적합합니다.서보 모터는 피드백을 사용하기 때문에 더 빠르고 강하며 정확합니다.최고의 모터는 속도, 부하, 정확도 및 예산과 같은 요구 사항에 따라 다릅니다.차이점을 아는 것은 올바른 모터를 선택하고 더 나은 시스템을 구축하는 데 도움이 됩니다.
뜨거운 기사
- LM358 듀얼 작동 증폭기 포괄적 인 가이드 : 핀아웃, 회로도, 등가, 유용한 예제
- CR2032 및 CR2016 상호 교환 가능합니까?
- 차이 이해 ESP32 및 ESP32-S3 기술 및 성능 분석
- 올바른 배터리 선택 : AG4, LR626, LR66, 177/376/377, SR626 및 SR626SW에 대한 가이드
- NPN vs. PNP : 차이점은 무엇입니까?
- BC547 트랜지스터 기본: 핀 배치, 응용 회로, 대체/보완 모델
- ESP32 vs STM32 : 어떤 마이크로 컨트롤러가 더 낫습니까?
- MOSFET이란 무엇이며 작동 방식은 무엇입니까?
- 전기 릴레이 기본 : 작업 작동, 유형 및 사용
- PNP 트랜지스터 : 구조, 작업 원리 및 응용 프로그램
 올바른 전류 변환기 선택을 위한 실용 가이드
올바른 전류 변환기 선택을 위한 실용 가이드
2026-02-04
 열전퇴 센서 및 그 사용에 대한 간단한 안내서
열전퇴 센서 및 그 사용에 대한 간단한 안내서
2026-02-03
자주 묻는 질문 [FAQ]
1. 스테퍼 모터가 서보 모터를 대체할 수 있나요?
일부 저속 및 경부하 애플리케이션에서는 그렇습니다.그러나 고속, 무거운 부하 또는 피드백이 필요한 시스템의 경우 서보 모터가 더 나은 선택입니다.
2. 스테퍼 모터에 인코더가 필요합니까?
표준 스테퍼 모터에는 인코더가 필요하지 않지만 인코더를 추가하면 정확도가 향상되고 까다로운 애플리케이션에서 단계 누락을 방지할 수 있습니다.
3. 서보 모터가 스테퍼 모터보다 비싼 이유는 무엇입니까?
서보 모터에는 피드백 센서, 고급 컨트롤러 및 보다 복잡한 전자 장치가 포함되어 있어 비용이 증가합니다.
4. 스테퍼 모터에 과부하가 걸리면 어떻게 되나요?
과부하가 걸리면 스테퍼 모터가 경고 없이 단계를 건너뛰어 위치 오류가 발생할 수 있습니다.
5. 스테퍼 모터에 소음이 있나요?
스테퍼 모터는 특히 특정 속도에서 또는 적절한 드라이버가 없을 때 소음과 진동을 일으킬 수 있습니다.
6. 서보 모터에 튜닝이 필요합니까?
예, 서보 모터는 시스템 부하에 맞추고 안정적인 성능을 달성하기 위해 튜닝이 필요한 경우가 많습니다.
핫 부품 번호
 CC0402KRX7R8BB472
CC0402KRX7R8BB472 C3216X8R1E155M160AB
C3216X8R1E155M160AB C2012CH2E222J125AA
C2012CH2E222J125AA 2225CC154MAT1A
2225CC154MAT1A TAJD157K006RNJ
TAJD157K006RNJ T491T106K016ZT
T491T106K016ZT AWSCR-8.00CV-T
AWSCR-8.00CV-T GRM2196R2A301JZ01D
GRM2196R2A301JZ01D IRG4PC40UDPBF
IRG4PC40UDPBF IRF7707TRPBF
IRF7707TRPBF
- MAX4216EUA+T
- CY14B104NA-ZSP25XI
- RM1200DG-66S
- V375A24M600AL
- LM338K
- DAC8234SPFB
- BQ24703PWRG4
- AD22293Z
- PCF8574T
- 74VHC74AMTC
- ADG433BRZ-REEL7
- CY22K7PVC-1
- IP4303CX4/LF
- LE79Q2284FVC
- MB1519PF
- PCCS8016E.C0-99886
- PEB2035NV4.1
- QM09N65F
- SL1925E/KG/NP2T
- SP213ECA/TR
- TC74VHC132FS
- UPD72852BGB-YEU-A
- PTN36001HX
- STX7710CUC
- MAX1300BEUG
- 216MCA4ALA12FG
- M74HC4520B1N
- MAX491ESDMAX491ESD
- STI5516SWC-ES
- AK3610Q12802
- ALC5682I-VD-CGT
- CS241C074PNTRQ1
- HD64F7055SF40K
- ISL99390FRZ-TR5935
- MSM66587A-133TB
- TMS27PC010A-12FML
- M36LLR8760D1ZAQ
- UA78MGU1C
- HEDL-5600-A06